Limited only by your imagination - and your obsession with productivity. JL
Evan Ackerman reports in IEEE Spectrum:
With an extra arm, you could do all kinds of stuff! Throwing three
frisbees at once! Eating three times as many slices of pizza at the same
time! Giving three thumbs up! Er, other things! Seriously though, if
we’re going to get real about supernumerary robotic limbs, we have to
know what people really want them for.Researchers concluded that they should pursue the idea of an extra
robotic arm as “a valuable tool in a professional setting” rather than
“a valuable tool in a three-armed ultimate frisbee league.” Oh well. Having extra robotic limbs sure sounds cool, in theory. With an extra arm, you could do all kinds of stuff! Throwing three frisbees at once! Eating three times as many slices of pizza at the same time! Giving three thumbs up! Er, other things! Seriously though, if we’re going to get real about supernumerary robotic limbs, we have to know what people really want them for. Guy Hoffman’s lab at Cornell has some experience with sticking bits of robots onto people, and in a paper presented at RO-MAN 2017, grad student Vighnesh Vatsal figures out the kinds of tasks for which a third arm might actually be useful.
The robotic arm that the Cornell researchers are experimenting with is a new design that’s a compromise between an extra arm mounted on the torso and extra fingers (or an extra thumb) mounted on the hand. It’s a little stubby arm and gripper that you wear on your elbow:
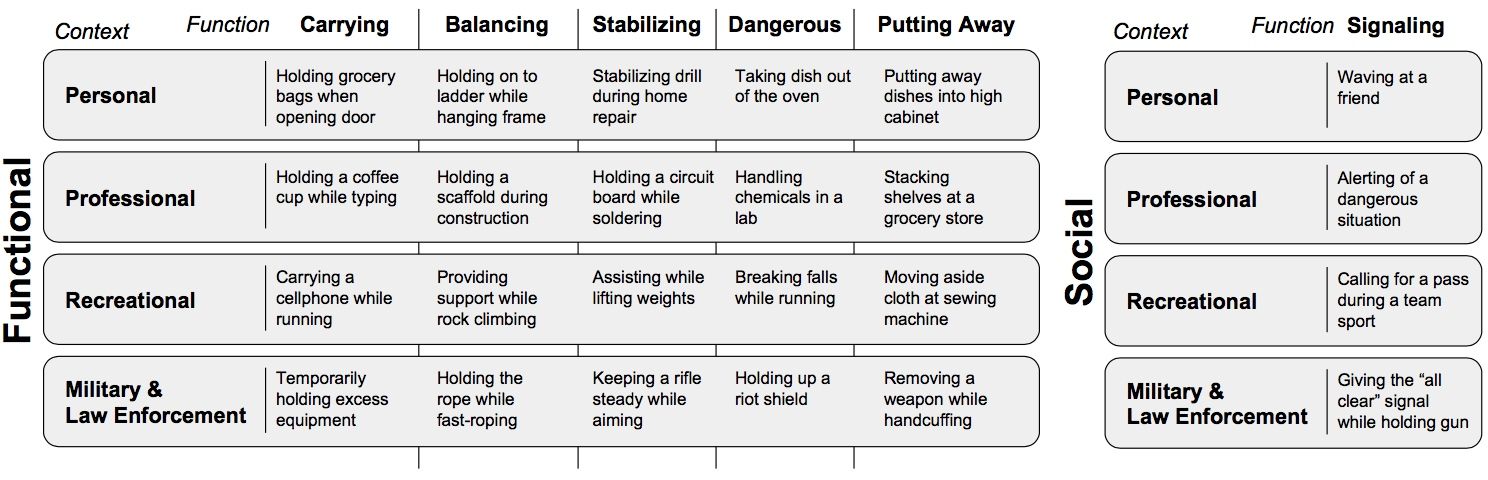
The arm can rotate (pan) 120 degrees, and it can extend its gripper (which is based on the Yale OpenHand) 16 centimeters. It weighs about 2 kg. With only 3 degrees of freedom, this arm is obviously not intended to be a direct replacement for the capabilities of any of your existing limbs or digits, but it can help you out in a number of useful ways. To figure out what those ways are, the researchers conducted brainstorming sessions, and even asked the opinions of their friends on social media (which seems like an incredibly risky idea): “What would you use a wearable robotic third arm for?” Here’s what the wisdom of the crowd came up with: Image: Cornell University Possible applications for a wearable robotic arm. Along with those usage contexts, the researchers also identified six usage functions for the arm:
Carrying objects and performing human-robot handovers.
Balancing the user by grasping and bracing using objects in the environment.
Stabilizing an object that the user is holding.
Handling dangerous objects such as chemicals and hotplates.
Putting away objects to outside the wearer’s reach or while hands are occupied.
Signaling, for example, using the robotic arm to gesture to a coworker for assistance.
Based on these data, an online survey was used to help refine the specific design features and requirements of the arm:
A wearable robotic third arm was considered more useful as a functional tool than for social uses by a wide margin. Moreover, people thought it was more useful in professional and military settings, and least in recreational contexts. Similarly, respondents could generally see themselves using a third arm more for functional use, but chose the personal context as more likely for their own use. Overall, respondents saw themselves less likely to use such a robot compared to how useful they rated it to be overall.
Sadly, this led the researchers to conclude that they should pursue the idea of an extra robotic arm as “a valuable tool in a professional setting” rather than “a valuable tool in a three-armed ultimate frisbee league.” Oh well.
A crew working on building renovations on the Cornell University campus offered some advice in the domain of building construction, which lead to a usability study investigating several different applications:
Here are a few things that the researchers learned:
The weight of the robot was a major concern for participants. Users often struggled to perform the task, and in one case, even had to hold up the third arm with their free hand. Generally, the forearm was often not considered to be a desirable location.
Participants desired more dexterity than was presented to them, especially from the end effector. The particular DoFs desired by participants were strongly tied to the application domain. A participant who had worked in chemistry labs said that it would be helpful if the third arm could “scoop out [small] amounts of powders with a small spatula.”
Many participants wanted voice-control of the robotic arm with at least some autonomy: “I want to be able to tell it to do something, and it should just do it.”
In this study, the robot was open-loop controlled, meaning that it went through a preset trajectory. Most participants commented that the arm’s intentions were not clear throughout the trajectory: “I had no sense of warning [when it was going] to pick up or drop objects.”
When speaking about the appearance of a wearable third arm device, users’ imaginations were often informed by fictional characters. In a few cases, participants suggested modeling the device on existing prosthetic devices. Most prominently, however, participants found the idea of another human-like arm attached to their bodies to be “a bit creepy,” especially “if it were to look like human skin or flesh.” One participant said that this would be “[...] scary. It would feel like the arm of another person, but no one’s there.”
Studies like these are important because the pace of robotics is so fast that all too often, the things that we can do with technology outpace any rational need for those capabilities (I’m looking at you, urbandeliverydrones). As much as the idea of a third robotic arm might sound awesome, when people start trying to use them in practical settings, all kinds of issues show up. These issues aren’t fatal, of course, but it means that the researchers will be developing a series of prototypes based on what they’ve learned, with the end goal of coming up with hardware and software that users will find valuable and be happy with.
For more details, we spoke to the lead author on the paper, Vighnesh Vatsal, via email. IEEE Spectrum: How did you decide on the specific functionality to include with your wearable robot design? Vighnesh Vatsal: First, we had human augmentation in mind for the specific functionality of the robot. We wanted to add modes of motion that are not normally found in humans, as opposed to prostheses and exoskeletons, which replace or boost existing human capabilities. Hence the horizontal panning at the elbow and length extension capabilities. Then, we wanted the arm to be lightweight enough to move around easily, but still extend a person’s reach and allow them to operate in more places at once. Why did you choose to investigate building construction specifically? Can you talk about other domains that seemed promising? Building construction brings together many of the factors we’re looking for: tasks that are repetitive and physically demanding, scenarios involving pick-and-place tasks and handovers between people, and potential users who already have proficiency in working with machines. Another promising professional domain identified in the online survey was handling packages in supermarkets and warehouses, while stowing and retrieving from shelves. Since the brainstorming session was open-ended, responses ranged from “scratching my dog’s ear while I read a book”, to “providing extra support while rock-climbing”, and everything in between. Do you feel like the design implications that emerged from your study reflect a practical view of what's currently possible with a robotic system? What needs to happen before I can buy one of these for myself? Some of the design implications, such as reduced weight, better dexterity, and voice or visual feedback can definitely be implemented with present technology. Other implications, like shared autonomy, and collaboration between the user and robot, represent open problems in control theory and artificial intelligence, and these are the focus of our next research phase. We can envision wearable devices designed for specific applications coming out as products soon, but more general-purpose devices are probably much further in the future. What are you working on next? Right now we’re studying the biomechanical aspects of the robot to improve safety and ergonomics. At the same time, we’re working on path-planners and controllers that can handle disturbances in the robot’s motion plan caused by the wearer. We’re also trying to teach the robot behaviors for a task involving collaborative assembly or cleanup tasks.
As a Partner and Co-Founder of Predictiv and PredictivAsia, Jon specializes in management performance and organizational effectiveness for both domestic and international clients. He is an editor and author whose works include Invisible Advantage: How Intangilbles are Driving Business Performance. Learn more...



















0 comments:
Post a Comment